

The software packages for the DRS4 Evaluation Board contain a command line interface to the USB board called drscl ("DRS Command Line"):
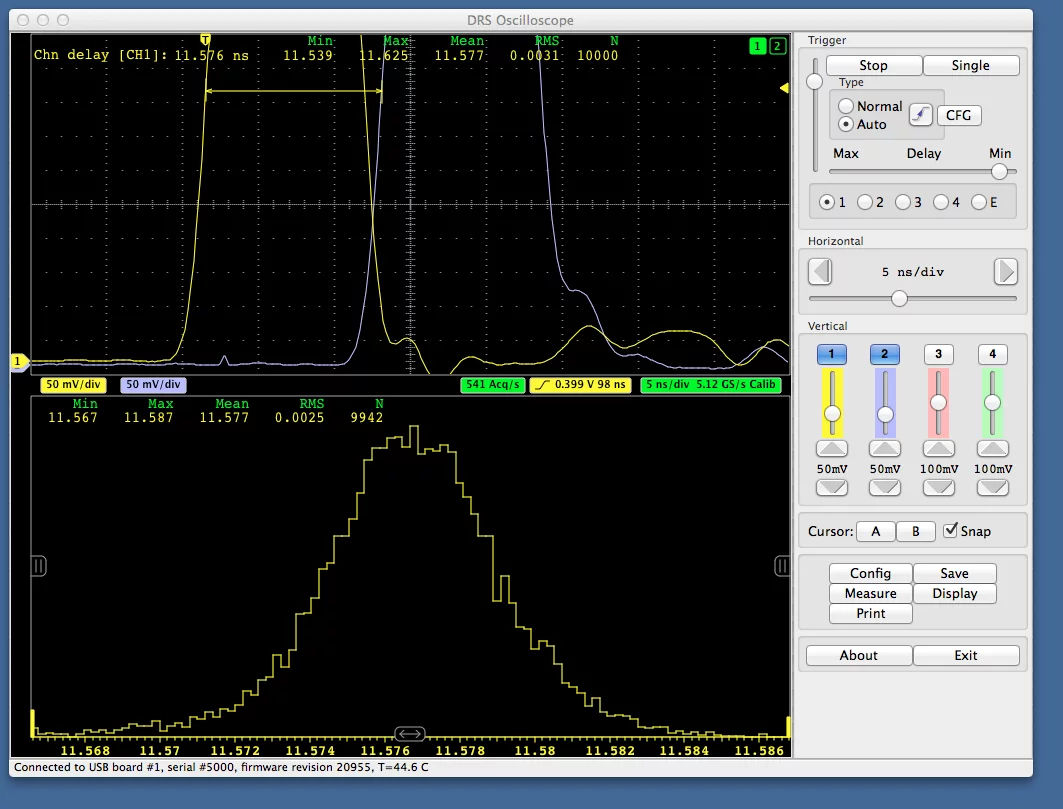
and an oscilloscope application called DRSOsc:
This application is build with the wxWidgets library, so the same source code runs under MS Windows, Linux and Mac OSX. All DRS software is Open Source (GPLv3). The master repository of the DRS software is at https://bitbucket.org/ritt/drs4eb/
Software Version History
Several software versions are available as the development continues. They all contain the documentation, drivers, applications, C/C++ source code and the FPGA firmware in VHDL and compiled bit files. Each realease conains a certain firmware version for the evaluation board. While the software is mostly backwards compatible (e.g. PC version 2 runs with en evaluation board 1.2), certain features might require a certain board firmware revision. Here is a quick overview of the different versions:
Version 1.0
This initial realease was made for the Evaluation Board 1.2, which was shipped in a plastic box. This version contains firmware revision 13191.
Version 2.0
Version 2.0 was made for the Evaluation board 2.0, which is shipped in a metal box. This newer evaluation board contains an additional multiplexer so one can trigger on any one of the four input channels, while the old board could only trigger on channel #1. This version contains also the firmware revision 13191.
Version 2.1
Version 2.1 contains sophisticated calibration routines for the evaluation board. Using these routines, the noise level of the board can be reduced from ~8 mV RMS to below 1 mV RMS, and the timing accuracy can be improved down to ~10 ps. Unfortunately this works only with firmware revision 13279 or later, which is included in this package. People having received an evaluation board with an older firmware version can upgrade the firmware using a Xilinx download cable by flashing the file drs4_eval1.mcs contained in this package.
Version 2.1.1
Version 2.1.1 is identical to 2.1 except that it contains a small example program to guide users to write their own application using the DRS library.
Version 2.1.2
Version 2.1.2 saves waveform in XML format as t/y points which then contains the proper timing calibration.
Version 2.1.3
Version 2.1.3 adds input range change of the evaluation board between -0.5V...+0.5V and 0V...+1V.
Version 3.0.0
This version is required for the new evaluation board V3.0 with active input buffers. Versions prior to this will not work with that board. The DRS oscilloscope application in this version contains several improvements such as visual feedback for the timing calibration and more analysis tools.
Version 3.0.1
This version is basically 3.0.0 re-compiled with MS Visual Studio 10 and bundled with version 1.2.2 of libusb to support Windows 7 64-bit.
Version 3.1.0
This version contains an improved version of the DRS Oscilloscope. Using multi-threading, it is able to read out and save waveforms with about 500 waveforms per second. The binary file format has been changed to contain time stamps etc. The format is documented in the 3.1 manual contained in that distribution.
Version 4.0.0
This version is required for the evaluation board V4 with new inputs for multi-board synchronization. Versions prior to this will not work with that board.
Version 4.0.1
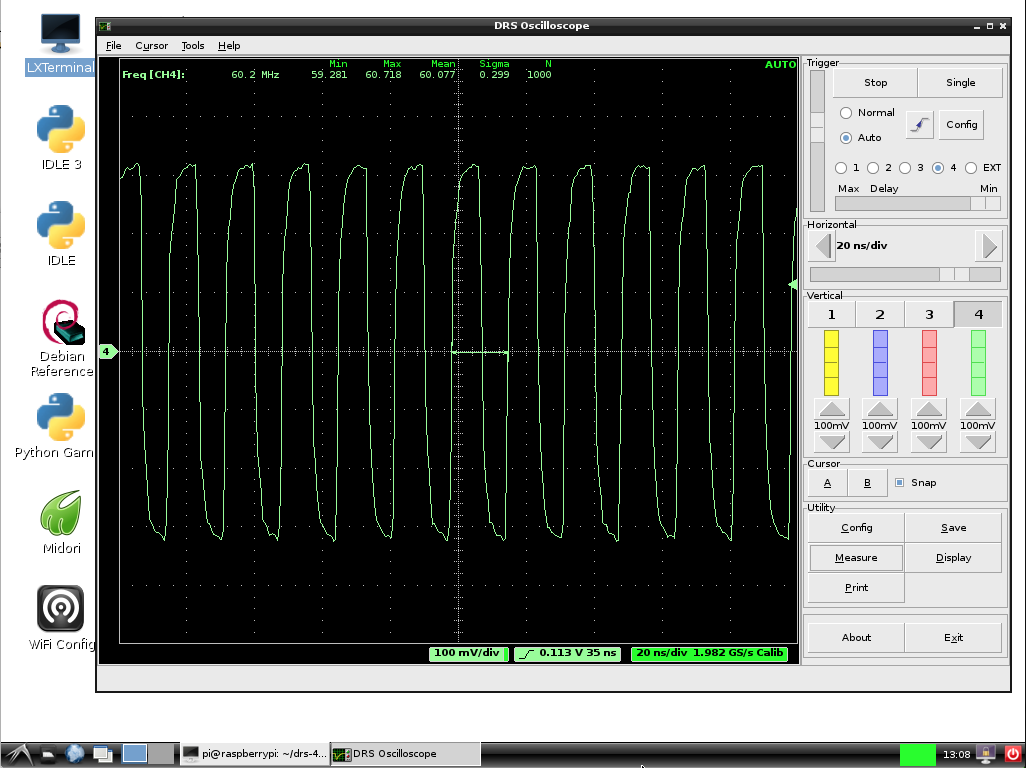
This version adds support for the Raspberry Pi computer. See the installation notes.
Version 5.0.0
This version is for the evaluation board V5 with has improved timing capabilities. But a new calibration algorithm, this software together with the V5 board is capable to measure the time between two signals with a precision of about 3 pico seconds (see screenshot above). The software can also be used with V4 boards, although the timing resolution will not improve for those boards. In addition, the software has the capability to read several V4 or V5 boards simultaneously, so people can build small DAQ systems with two or more boards. It also has an improved measurement facility which can display the histogram distribution of measured values.
Version 5.0.1
Fixes and error in the XML format.
Version 5.0.2
Contains support for evaluation boards with cascading (2048 bins per channel).
Version 5.0.3
Fixed two errors in the binary data format. Prior to this version, binary files were corrupt when using more than four boards, and the time header was at the wrong position when saving files more than once after the program start.
Version 5.0.4
Implemented "Transparent Trigger Mode" which is required if one uses external trigger logic. Requires firmware 21699 or later.
Version 5.0.5
Changed binary data format which now contains scaler values for active channels. New format is defined in the current version of the manual. Fixed problem that not all channels got saved to a file in a multi-board set-up.
Version 5.0.6
Fixed problem with multiple 2048 bin boards. Implemented saving of histograms.
MS Windows
Download Installer
Alternative location
- Tested under Windows 7 64-bit.
- Windows 10: Please install the Zadig USB driver after the installation of the DRS software package. Plug in the DRS4 evaluation board and run the Zadig program. Select the DRS4 Evaluation Board from the list of devices and click on "Install Driver".
- Some older computers might require the the installation of the Microsoft Visual C++ 2008 Redistributable Package for software version 3.0.0 and before to run the programs. Version 3.0.1 and later contains all necessary files inside the package.
- drscl and DRSOosc are contained precompiled in this package, but if you want to compile the example program with Visual C++, you need first to install the libusb package.
Linux
Download Source code tar ball
Alternative location
* Requires wxWidgets package.
- Requires libusb-1.0 package.
- Tested under Scientific Linux 5.1 and Mac OSX 10.9.
- Tested on the Raspberry Pi model "B". See screen shot.
{kind=link}