
Des chercheurs de l’Institut Paul Scherrer PSI et de l’ETH Zurich ont développé une micromachine capable d’exécuter différentes actions. Le principe consiste à programmer la magnétisation de nanoaimants logés dans certains composants du microrobot pour contrôler ensuite les différents mouvements au moyen de champs magnétiques. Des machines de ce genre, de quelques micromètres seulement, pourraient par exemple être utilisées dans le corps humain pour exécuter de petites interventions chirurgicales. Les chercheurs publient à présent leurs résultats dans la revue scientifique Nature.
(Photo: Institut Paul Scherrer/Mahir Dzambegovic)
(Photo: Institut Paul Scherrer/École polytechnique fédérale de Zurich)
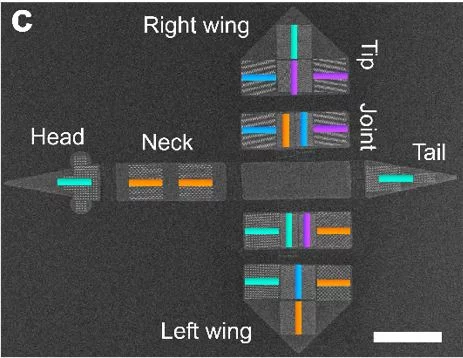
Le robot, qui ne mesure que quelques micromètres, ressemble à un oiseau de papier en origami, cet art japonais du pliage. Mais à la différence d’une figure de papier plié, ce robot évolue comme s’il était actionné par une main invisible, sans qu’aucune force apparente ne s’exerce sur lui. Il bat des ailes ou arque le cou et rentre la tête. Toutes ces actions, c’est le magnétisme qui les rend possibles.
Des chercheurs de l’Institut Paul Scherrer PSI et de l’ETH Zurich ont assemblé une micromachine composée entre autres de matériaux qui renferment des nanoaimants. Ces derniers peuvent être programmés pour adopter une orientation magnétique définie. Quand ces nanoaimants programmés sont exposés par la suite à un champ magnétique, des forces spécifiques s’exercent sur eux. Et si les aimants sont logés dans des composants flexibles, les forces qui agissent sur eux induisent alors un mouvement.
Programmer des nanoaimants
Les nanoaimants peuvent être sans cesse reprogrammés. Ainsi, ce sont chaque fois des forces différentes qui s’exercent sur la construction, ce qui induit de nouveaux mouvements.
Pour la construction du microrobot, les chercheurs ont disposé des rangées d’aimants de cobalt sur de fines couches de nitrure de silicium. L’«oiseau» réalisé dans ce matériau s’est avéré capable d’exécuter différents mouvements: battre des ailes, flotter, se retourner ou encore glisser sur le côté.
«Ces mouvements du microrobot se jouent en l’espace de quelques millisecondes, explique Laura Heyderman, responsable du laboratoire Experimentations multi-echelles en matériaux au PSI et professeure de systèmes mésoscopiques au département Materiau à l’ETH Zurich. La programmation des nanoaimants, en revanche, se fait en l’espace de quelques nanosecondes.» Cela permet de programmer différents mouvements. Rapporté au modèle du micro-oiseau, cela veut dire qu’on peut le faire d’abord battre des ailes, puis glisser sur le côté, avant de le faire à nouveau battre des ailes. «Si nécessaire, on pourrait aussi l’amener entre-deux à flotter», affirme Laura Heyderman.
Microrobots intelligents
Ce concept novateur représente une étape importante vers des microrobots et des nanorobots qui ne stockent pas uniquement des informations pour une seule action précise, mais qui puissent être sans cesse reprogrammés pour accomplir différentes tâches. «On peut imaginer pour l’avenir une micromachine autonome qui naviguerait dans des vaisseaux sanguins humains et exécuterait des missions biomédicales comme la destruction de cellules cancéreuses», explique Bradley Nelson, directeur du Département de génie mécanique et des procédés.
«D’autres domaines d’utilisation sont envisageables, comme de la microélectronique flexible ou encore des microlentilles qui modifient leurs propriétés optiques», renchérit Tian-Yun Huang, chercheur à l’Institut de robotique et des systèmes intelligents de l’ETH Zurich.
Les possibilités ne s’arrêtent pas là: des applications où les spécificités des certaines surfaces se modifient seraient concevables également. «Cela permettrait par exemple de produire des surfaces qui se mouillent ou repoussent l’eau en fonction des besoins», relève Jizhai Cui, ingénieur et chercheur dans le laboratoire Systèmes mésoscopiques du PSI et de l’ETH Zurich.
Les chercheurs publient à présent leurs résultats dans la revue scientifique Nature.
Texte: Institut Paul Scherrer/Sebastian Jutzi
À propos du PSI
L'Institut Paul Scherrer PSI développe, construit et exploite des grandes installations de recherche complexes et les met à la disposition de la communauté scientifique nationale et internationale. Les domaines de recherche de l'institut sont centrés sur la matière et les matériaux, l'énergie et l'environnement ainsi que la santé humaine. La formation des générations futures est un souci central du PSI. Pour cette raison, environ un quart de nos collaborateurs sont des postdocs, des doctorants ou des apprentis. Au total, le PSI emploie 2100 personnes, étant ainsi le plus grand institut de recherche de Suisse. Le budget annuel est d'environ CHF 407 millions. Le PSI fait partie du domaine des EPF, les autres membres étant l'ETH Zurich, l'EPF Lausanne, l'Eawag (Institut de Recherche de l'Eau), l'Empa (Laboratoire fédéral d'essai des matériaux et de recherche) et le WSL (Institut fédéral de recherches sur la forêt, la neige et le paysage). (Mise à jour: mai 2019)
Contact
Prof. Laura Heyderman
Systèmes mésoscopiques
Institut Paul Scherrer, Forschungsstrasse 111, 5232 Villigen PSI, Suisse
Téléphone: +41 56 310 26 13, e-mail: laura.heyderman@psi.ch [anglais, français, allemand]
Prof. Bradley J. Nelson
Multi-Scale Robotics Lab
Institut de robotique et des systèmes intelligents
ETH Zurich, 8093 Zurich, Suisse
Telephone: +41 44 632 55 29, e-mail: bnelson@ethz.ch [English]
Dr Jizhai Cui
Systèmes mésoscopiques
Institut Paul Scherrer, Forschungsstrasse 111, 5232 Villigen PSI, Suisse
Téléphone: +41 56 310 34 33, e-mail: jizhai.cui@psi.ch [anglais, chinois]
Dr Tian-Yun Huang
Multi-Scale Robotics Lab, Institut de robotique et des systèmes intelligents
ETH Zurich, 8093 Zurich, Suisse
Téléphone: +41 44 632 02 96, e-mail: huangt@ethz.ch [anglais, chinois]
Publication originale
Nanomagnetic Encoding of Shape-morphing Micromachines
Jizhai Cui, Tian-Yun Huang, Zhaochu Luo, Paolo Testa, Hongri Gu, Xiang-Zhong Chen, Bradley J. Nelson, Laura J. Heyderman
Nature, 06.11.2019
DOI: 10.1038/s41586-019-1713-2